Humans set budgets when facing an uncertain future. So do ants
Imagine you are looking for a parking spot at a crowded event. You find one far from your destination. Do you decide to take it, or invest more time into hunting a better spot which may or may not exist?
You might resolve this decision by “budgeting”: limiting the resources (time) you will spend looking for a better option before settling for the inferior one. This strategy, which allows us to cut our losses when things don’t pan out as we had hoped, is commonly used when we cannot know the payoff of our choices in advance.
Making decisions under uncertainty is a problem we all face. In new research published in the Proceedings of the National Academy of Sciences, we show weaver ants (Oecophylla smaragdina) – much like humans – manage it by budgeting their investment into a task with an uncertain payoff.
Weaver ants bridge gaps with their own bodies
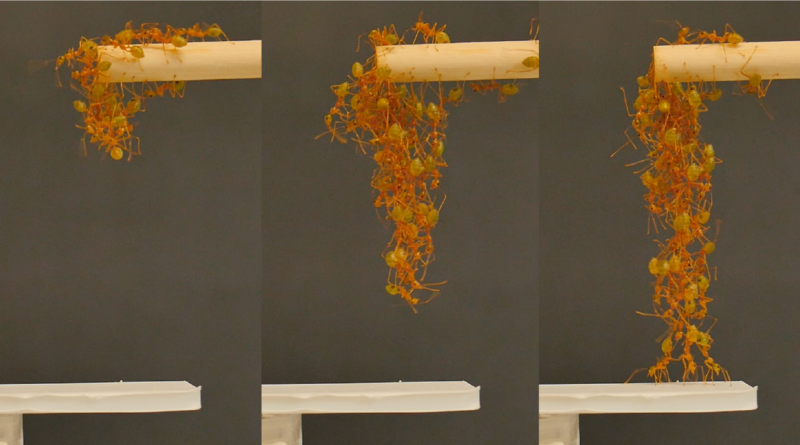
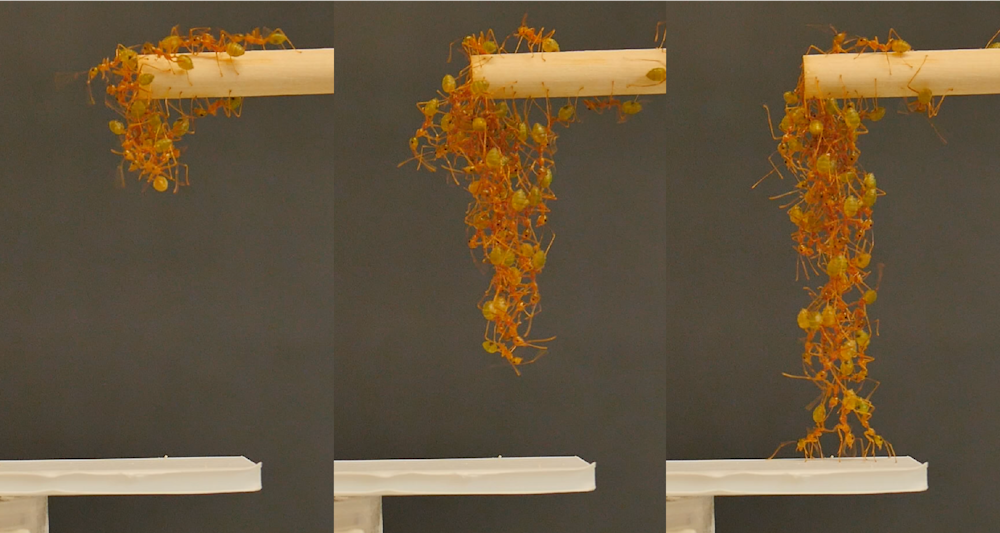
Weaver ants link their bodies together to form bridge-like structures called “hanging chains”, which they use for crossing gaps encountered along trails. Chains span several times the size of an individual ant and, most strikingly, are self-organized.
This means chains are formed without the help of leaders or external blueprints. Instead, each individual responds solely to its surroundings and local interactions with neighbours.
Understanding self-organization is central to understanding collective behaviour in animal groups – from flocks of birds to insect swarms – and other systems, including human crowds and traffic flow.
Chains are a gamble
Building a chain comes at a cost to the colony. Ants in the chain can’t participate in important colony tasks such as defending the nest and foraging. The cost of the chain is proportional to its length: longer chains are more costly, as they keep more ants occupied.
Chains provide a major benefit too: they allow ants to explore areas that would otherwise be inaccessible, which may offer food sources to the colony. Whether an area contains a profitable resource, however, is unknown to the ants until the chain has been completed.
This makes chain-building a gamble. Colonies must invest capital (a number of ants) into forming a chain, which may or may not pay off.
In our study we asked whether, like humans, ants budget their investment into a task when the payoffs are unknown. We expected ants would stop forming chains when the gap to be bridged became too tall, as the cost of the chain would become too great.
A simple mechanism for a complex decision
We initially challenged ants to bridge vertical gaps of 25mm, 35mm and 50mm in height. Ants could comfortably form chains within this range, which allowed us to precisely determine the rules they use to build chains.
A detailed analysis of the ants’ behaviour revealed that joining and leaving events happen primarily in the lowest part (1cm) of chains. This indicates that ants are unable to leave their position if one or more individuals start hanging from them.
Read more: Bridges, highways, scaffolds: how the amazing engineering of army ants can teach us to build better
We then found ants decide how long to stay in a chain by visually assessing their distance from the ground below. The closer to the ground, the longer an ant remains in the chain.
Chain formation is thus modulated by a simple rule: each ant remains in the chain for a length of time proportional to her distance to the ground, and remains stuck in place if one or more ants start hanging from her. The ant will then be able to move only if the other ant(s) leave.
Can this rule predict a distance beyond which ants stop forming chains? We answered this question using a mathematical model, which predicted ants should stop forming chains when the gap is taller than 89mm.
To confirm these predictions, we asked ants to form chains over gaps of 110mm – a distance well beyond the threshold predicted by our model. As expected, ants never formed chains over these gaps.
Tricking ants into investing more
If ants use vision to assess their distance from the ground, we should be able to trick them into building very long chains (greater than 90mm) by keeping the ground at a constant distance from the bottom of the chain.
We ran an additional experiment where we could lower the platform ants had to reach using a slider. As the chain grew, we lowered the platform, keeping it just out of reach of the ants. Using this apparatus, we tricked ants into forming chains as long as 125mm.
Similar to when we set ourselves a time limit for finding parking, ants set a distance limit before giving up. And they do so using a simple rule – remain in the chain for a length of time proportional to your distance to the ground.
Our results reveal how simple rules can guide groups in making adaptive collective decisions in the absence of payoff information. Not only does this help us understand ants – it also provides an algorithm for decision-making in uncertain scenarios, which can be applied in multi-agent artificial systems such as swarm robotics.